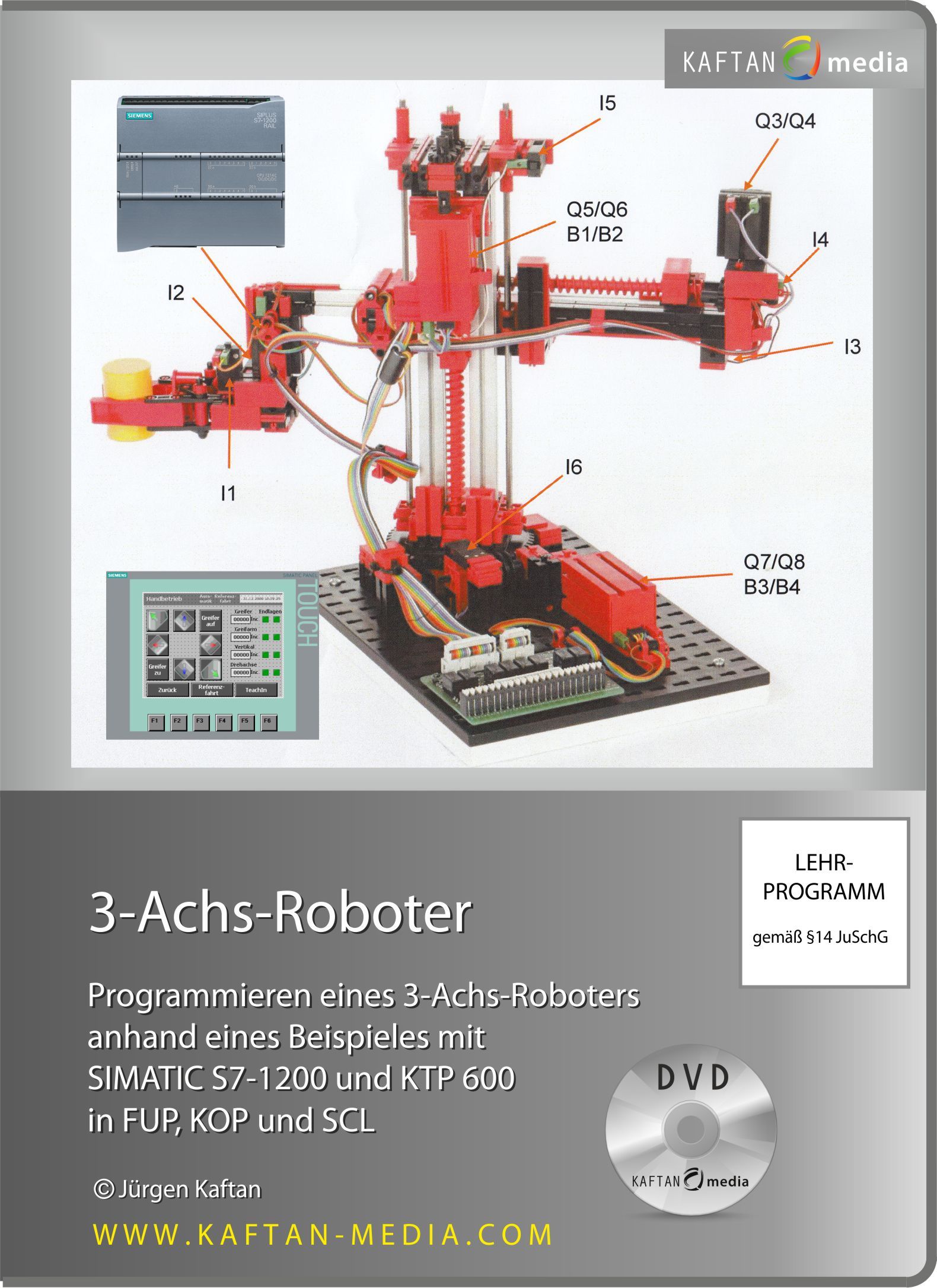
3-Achs-Roboter
Programmieren eines 3-Achs-Roboters anhand eines Beispiels mit SIMATIC S7-1200 und KTP600 in FUP, KOP und SCL
Jürgen Kaftan
Die Historie besagt, dass ein Mönch im Kloster zu Hanoi die Aufgabe bekam 64 Scheiben vom ersten Turm auf den dritten zu legen. Es gab 3 Türme und 64 Scheiben die alle unterschiedlich groß waren und geordnet vorlagen. In unserem Beispiel werden der Einfachheit halber nur 3 Bausteine verwendet. Die Ausgangsposition besteht aus einem Turm mit 3 Bausteinen die nacheinander abgebaut werden. Die Positionen dafür können mit „TeachIn“ gespeichert werden. Nach Abbau des Turmes wird eine Pause eingelegt, wo danach der Turm wieder aufgebaut wird. Der Vorgang kann von neuen beginnen.
Die Steuerung für den 3-Achs-Roboter soll die SIMATIC S7-1200 der Firma Siemens übernehmen. Die Bedienung soll mit einem HMI-Panel (z.B.KTP600) erfolgen.



















 Einführung in die Mathematik, Solartechnik und HMI Panel von Kaftan, Jürgen")
 Einführung in die Programmierung mit Siemens TIA Portal V15 von Kaftan, Jürgen")




 Teil 1 von Boddin, Dirk")