Hybrider Antrieb für Zerspanroboter abtriebseitiger Geber
Berend Denkena, Marcus Schönherr
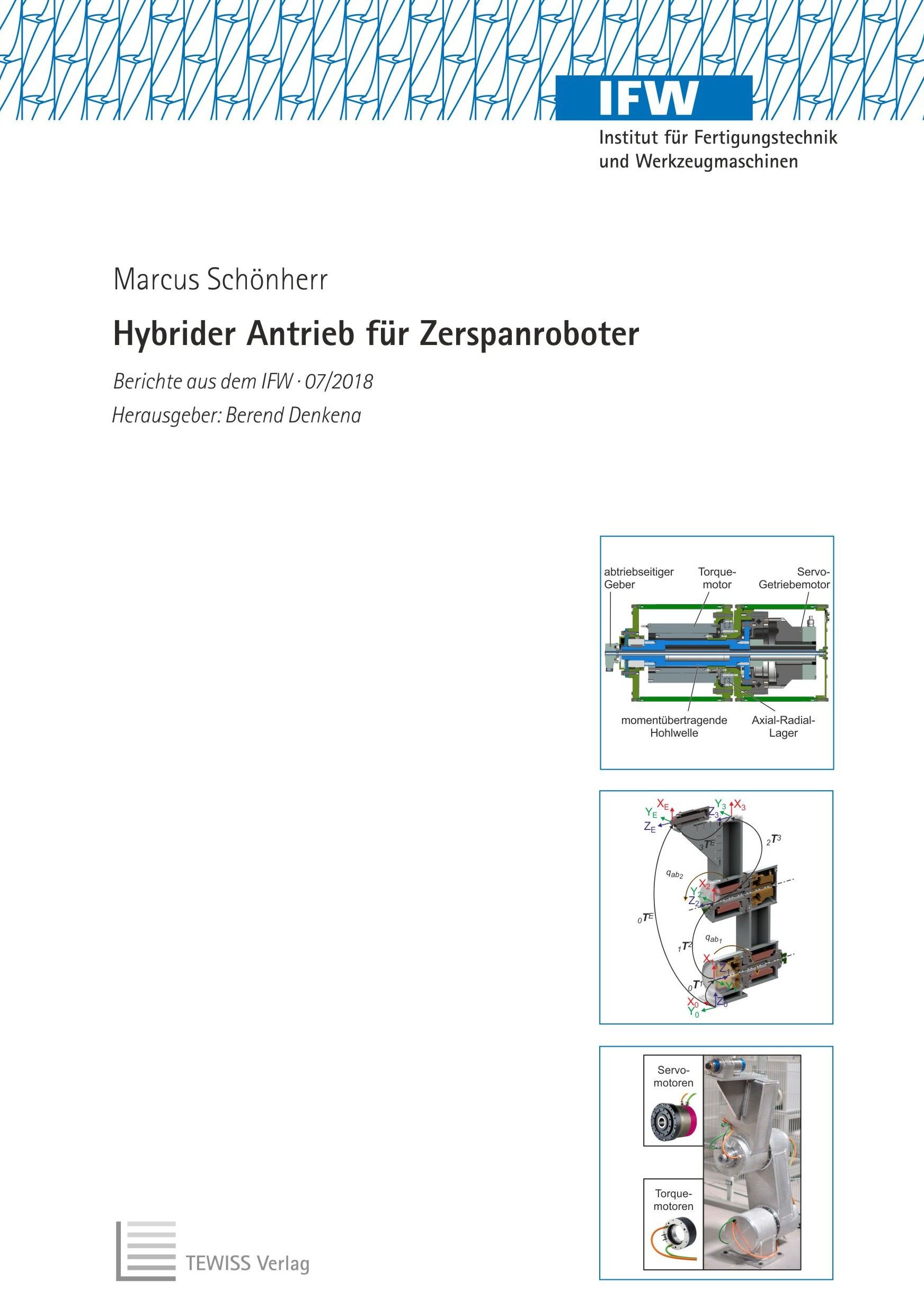
Das Ziel der vorliegenden Arbeit ist die Erforschung des Aufbaus und der Einsatzpotenziale und -grenzen eines hybriden Antriebskonzepts für Robotergelenke. Unter hybrid wird in diesem Kontext verstanden, dass die üblicherweise in Robotern verwendeten Servo-Getriebemotoren um zusätzliche Torquemotoren sowie abtriebseitige Winkelgeber erweitert werden. Nach der Auslegung und Konstruktion eines zweiachsigen Versuchsträgers wird ein mathematisches Modell des dynamischen Systemverhaltens ermittelt. Eine Kombination aus modellbasierter Momentenvorsteuerung und erweiterter Kaskadenstruktur wird zur Regelung eingesetzt. Anhand des prototypisch realisierten Versuchsträgers werden die Modellparameter identifiziert und gezielt Zerspanuntersuchungen durchgeführt. Ein Vergleich mit einem konventionellem Roboterantrieb im Hinblick auf die erzielte Bearbeitungsqualität gibt Aufschluss über die Potenziale und Grenzen des hybriden Antriebsprinzips.




 von Holdt, Sabine, Schönherr, Marcus")
 von Holdt, Sabine, Schönherr, Marcus")
 von Holdt, Sabine, Schönherr, Marcus")
 von Holdt, Sabine, Schönherr, Marcus")




